Ch3 Solving Problem by Searching
Ch3 Solving Problem by Searching
Introduction
- problem-solving agent: 本單元討論該agent
- 是一種goal-based agent (考慮未來行動 以及結果的可行性)
- limit: 考慮簡單的PEAS => 解答是一串固定的行動
Problem-Solving Agent
- search: 找到能達成目標的一串行動
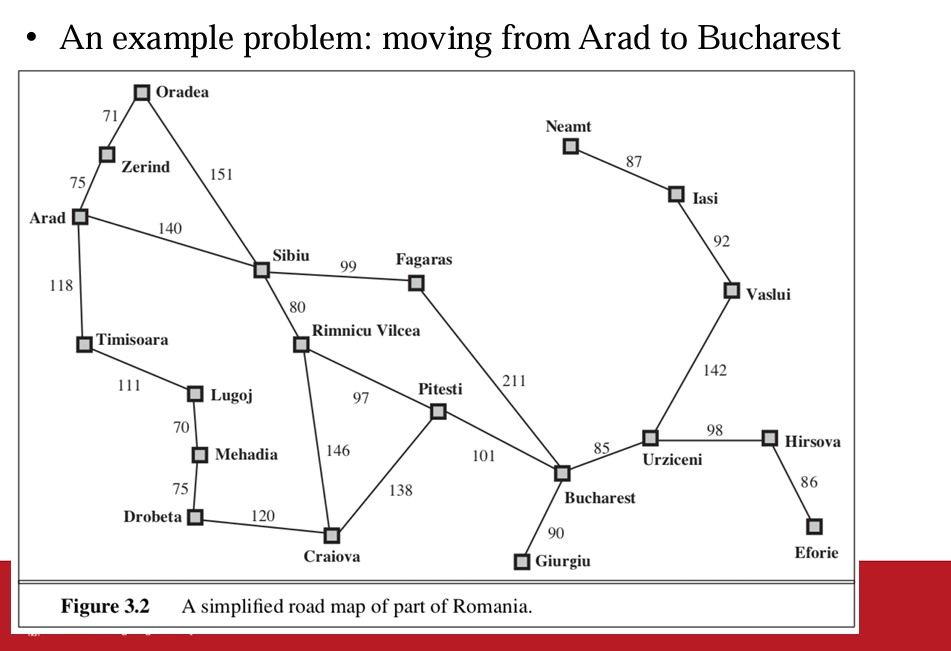
- 例題
Well-Defined Problems and Solutions
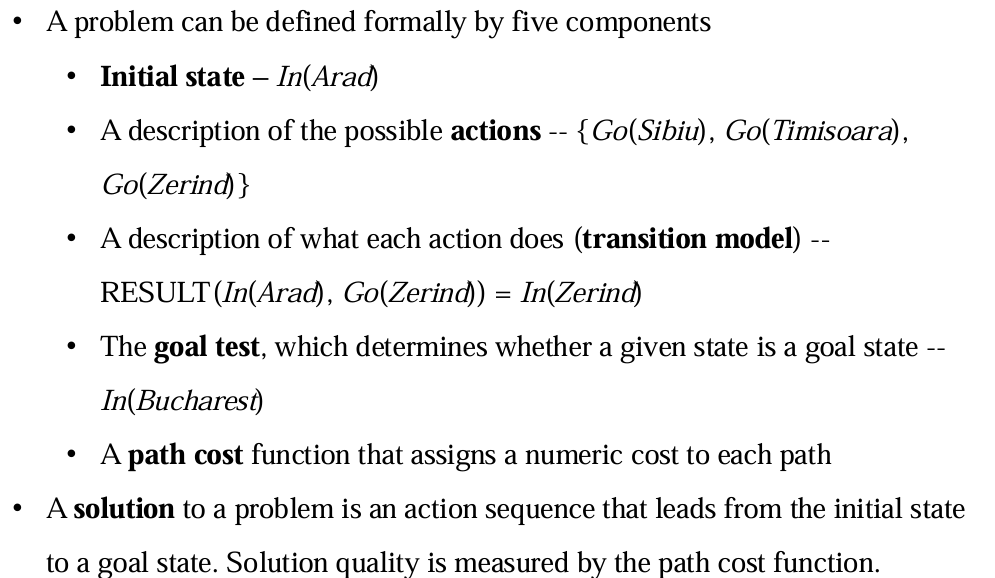
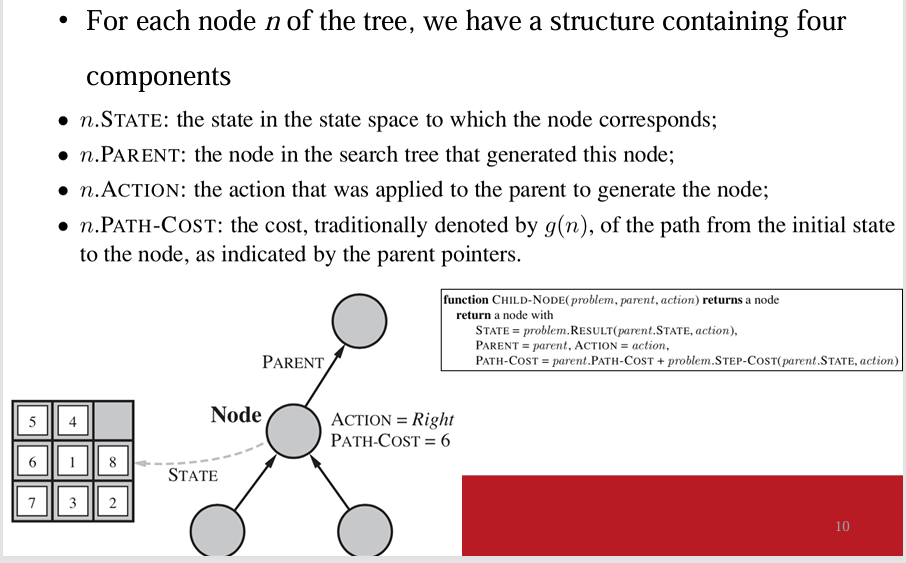
- 定義問題的五個組件
- Initial state
- action
- transition model
- goal test: 是否達成目標的測試
- path cost: 路徑花費
Formulating Problems
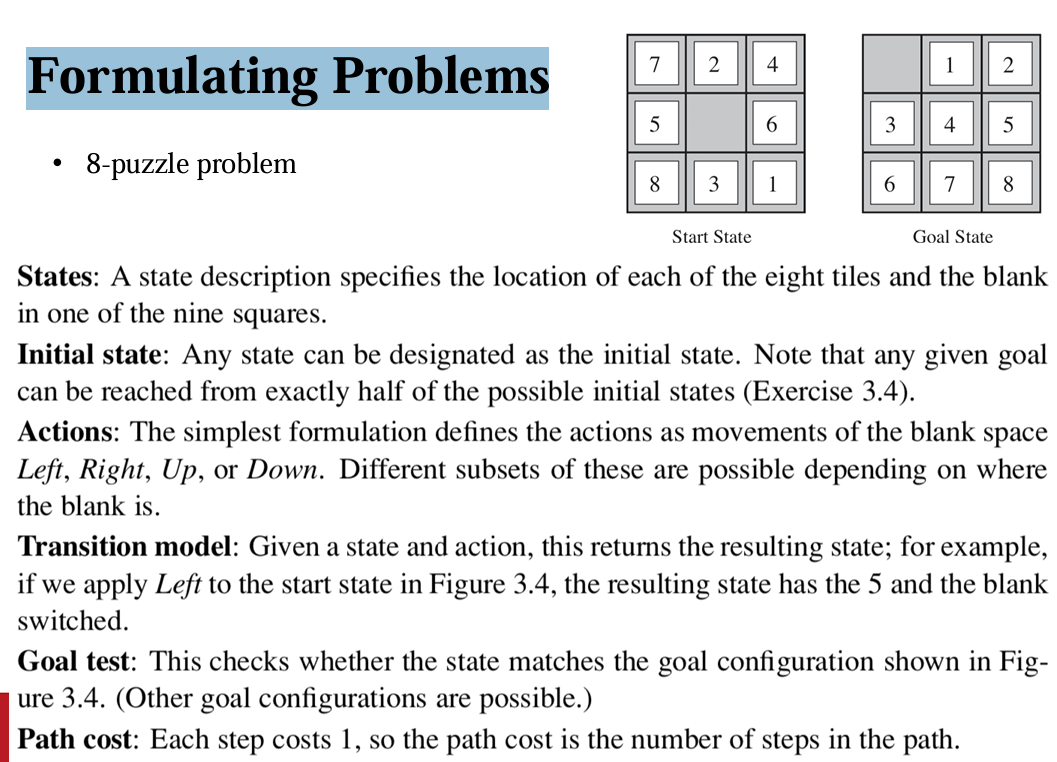
- 8拼圖問題
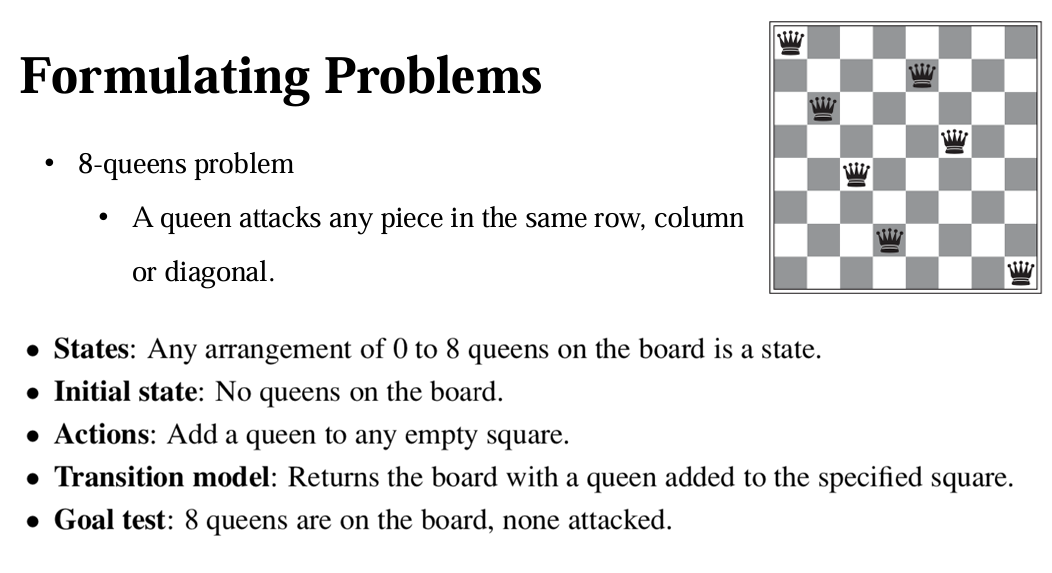
- 8皇后問題
Real-World Problems
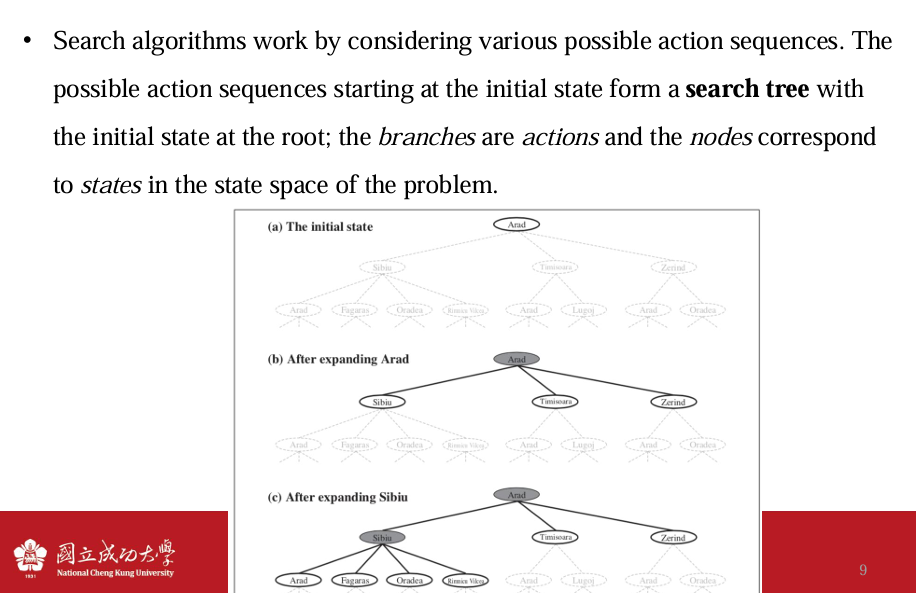
Searching for Solutions
Infrastructure for Search Algorithms
Measuring Problem-Solving Performance
- Completeness: 當存在解的時候,算法是否保證找到一組解
Uninformed Search Strategies
- Uninformed search: 無資訊搜尋
- 不知道節點額外資訊,只能確定是否為goal state
- 關注的是節點展開順序
- informed search: 有資訊搜尋
- 同義: heuristic search 啟發式搜尋
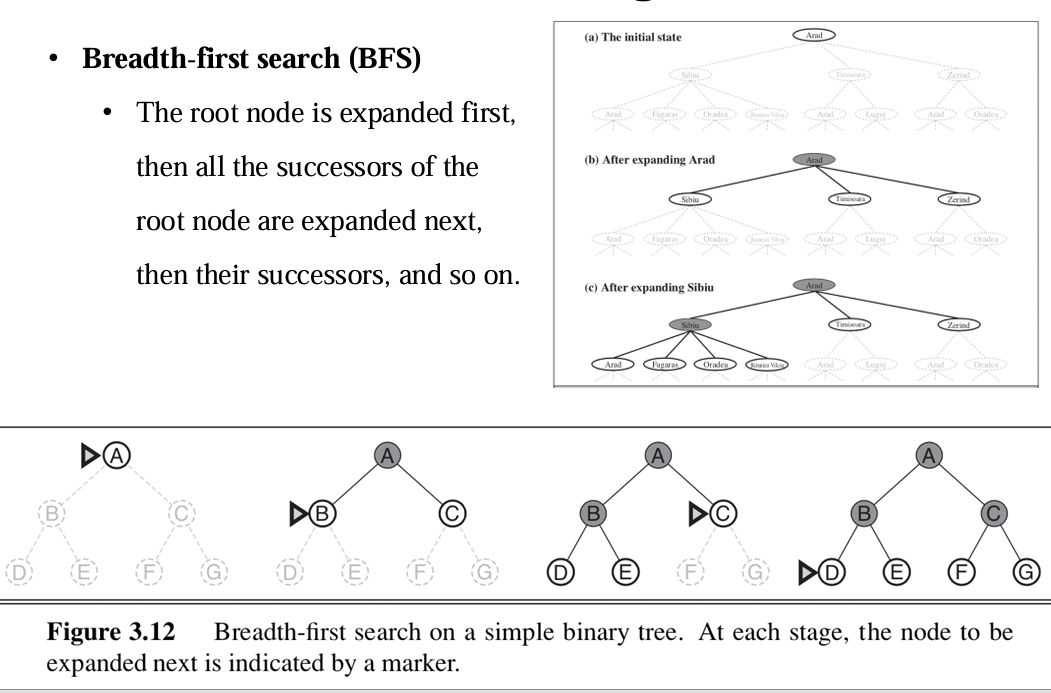
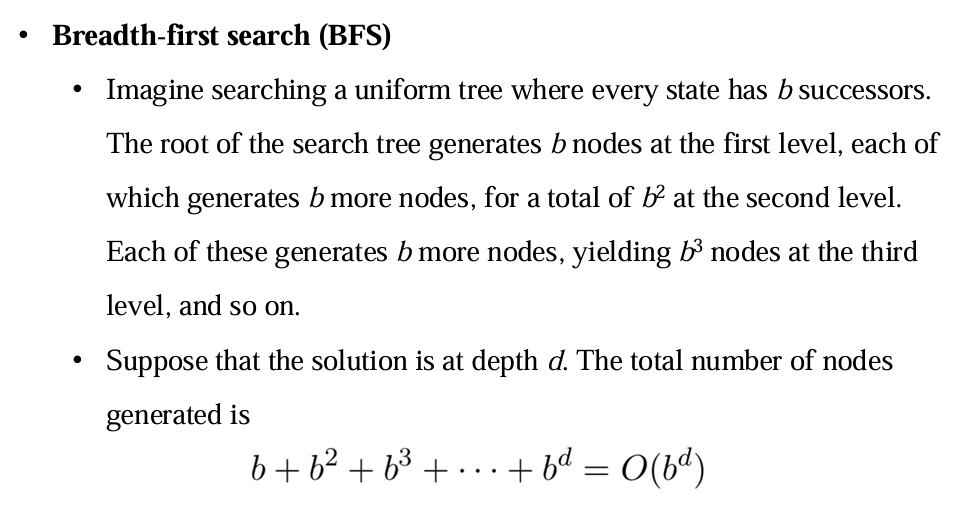
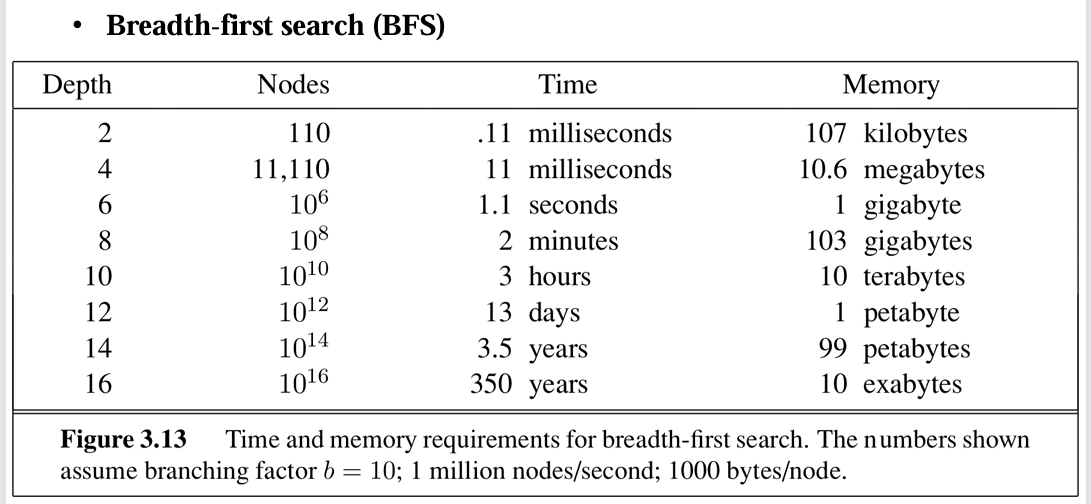
- BFS
- node generate num.
- measure
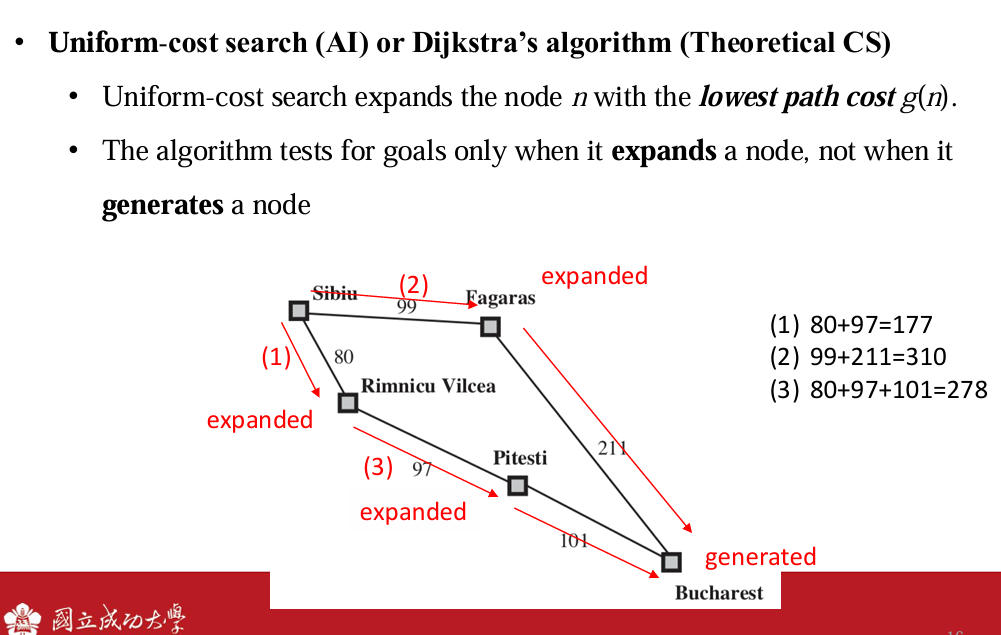
- 均值成本搜索(AI) or Dijkstra’s algorithm(Theoretical CS)
- 生成節點的時候不做goal test, expand node 的時後才做 (延遲)
- 每一步擴展 path cost 最低的點
- measure
- 指導原則是 path cost, 而非depth
- 當所有 step costs 相同 則相當於BFS
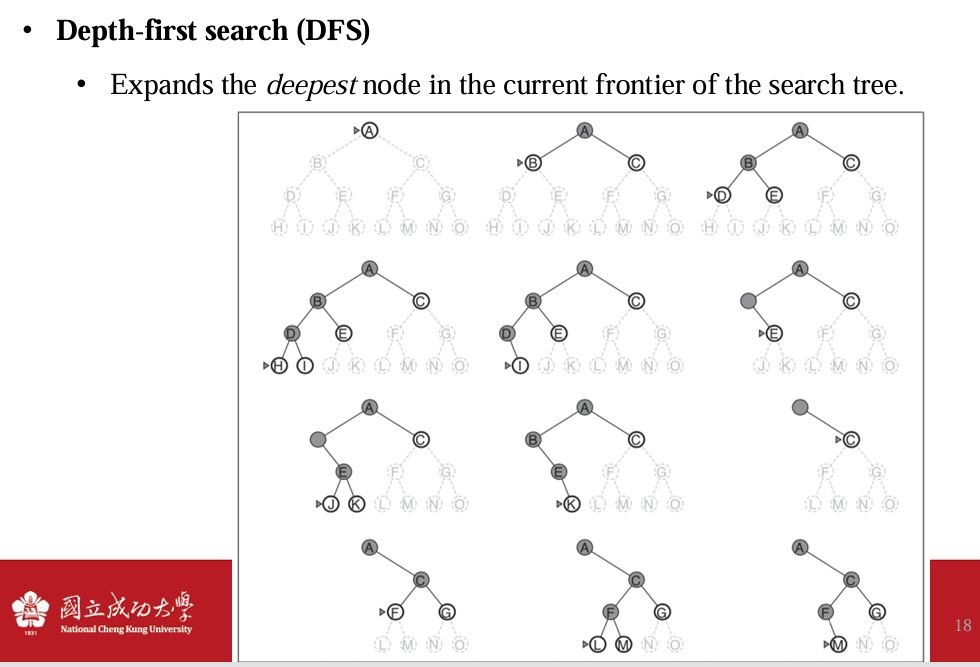
- DFS
- measure
- 可能超耗時間
- 節省儲存空間
- 根據我們對問題的瞭解 可以限制深度進行DFS
- 慢慢增加深度限制 得到兼顧空間、時間、completeness、optimal 的方法
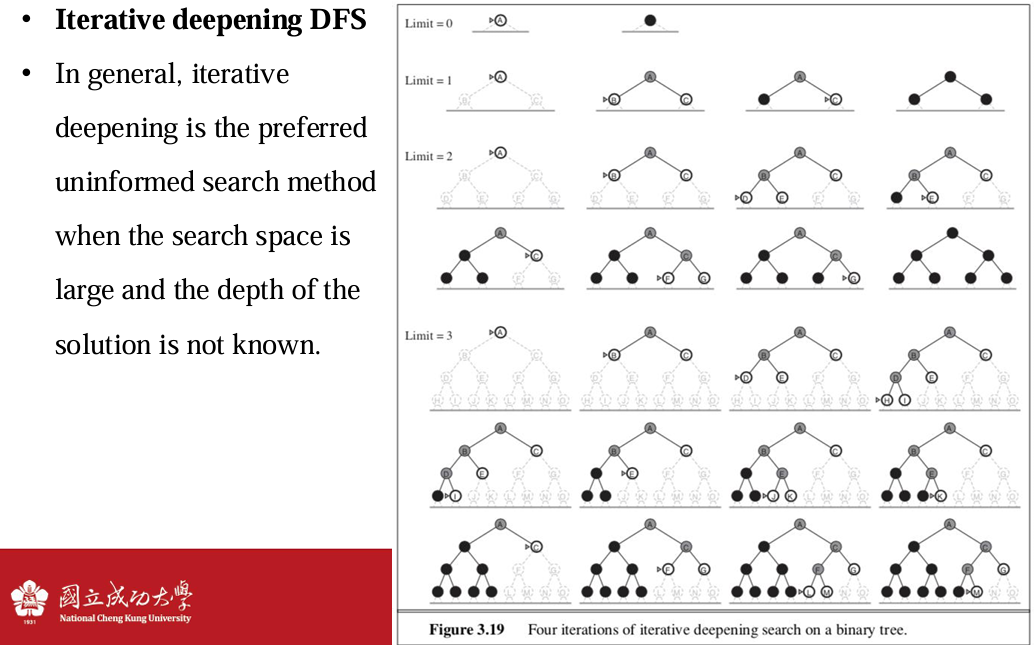
- 最推薦的方式
- 為何這不是大問題: 在搜尋樹中,隨著深度增加,每層的分支節點數目(即分支因子,branching factor)通常以指數增長。因此:
- 上層節點數量較少:相比樹的底層節點,樹的上層節點數目是極少的。底層節點佔主要計算量:樹中大部分節點集中於最深的那一層。因此,即便多次生成上層節點,對總計算成本影響不大。
- 為何這不是大問題: 在搜尋樹中,隨著深度增加,每層的分支節點數目(即分支因子,branching factor)通常以指數增長。因此:
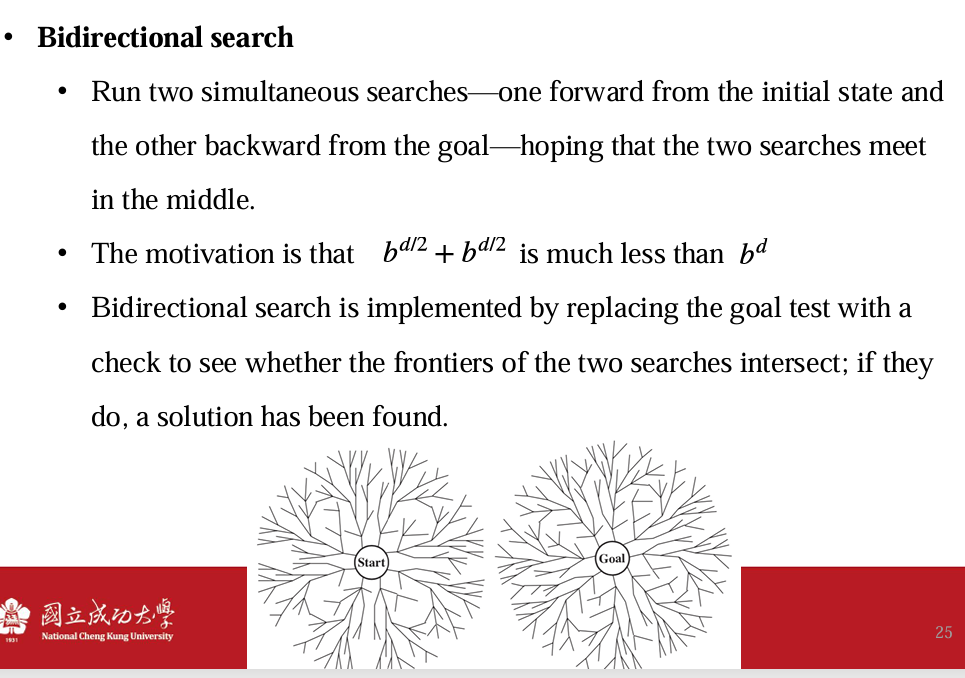
- 雙向搜尋
- 困難點是從goal 向後搜尋
Informed (Heuristic) Search Strategies
- 使用專屬於該問題的資訊來解決問題
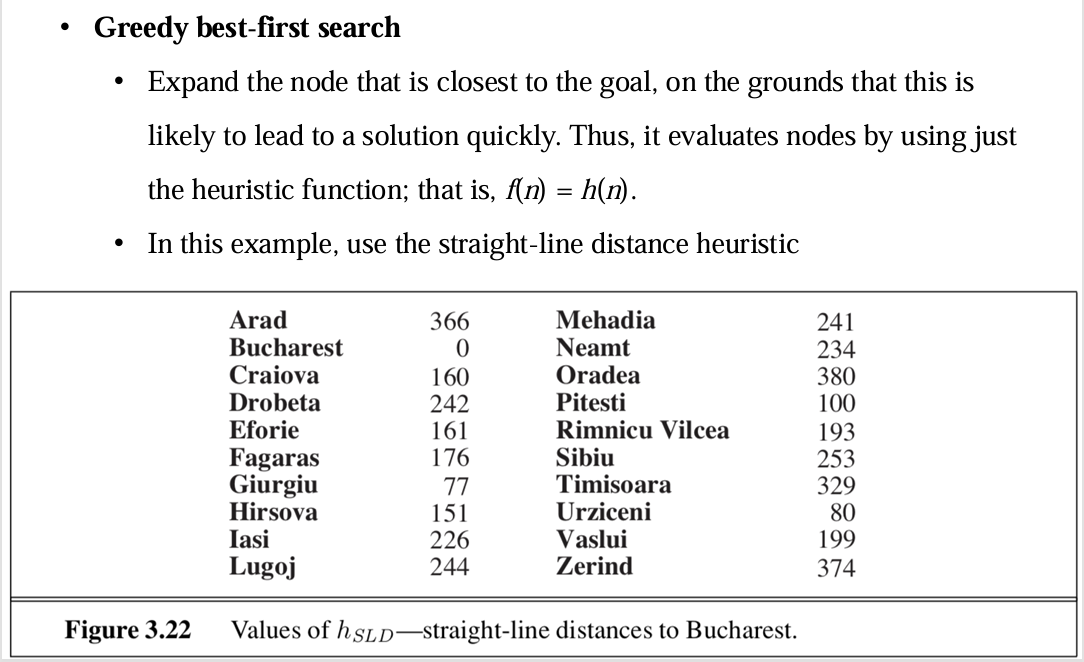
- 貪心優先搜尋
- 拿各城市到goal city 的直線距離來當作資訊
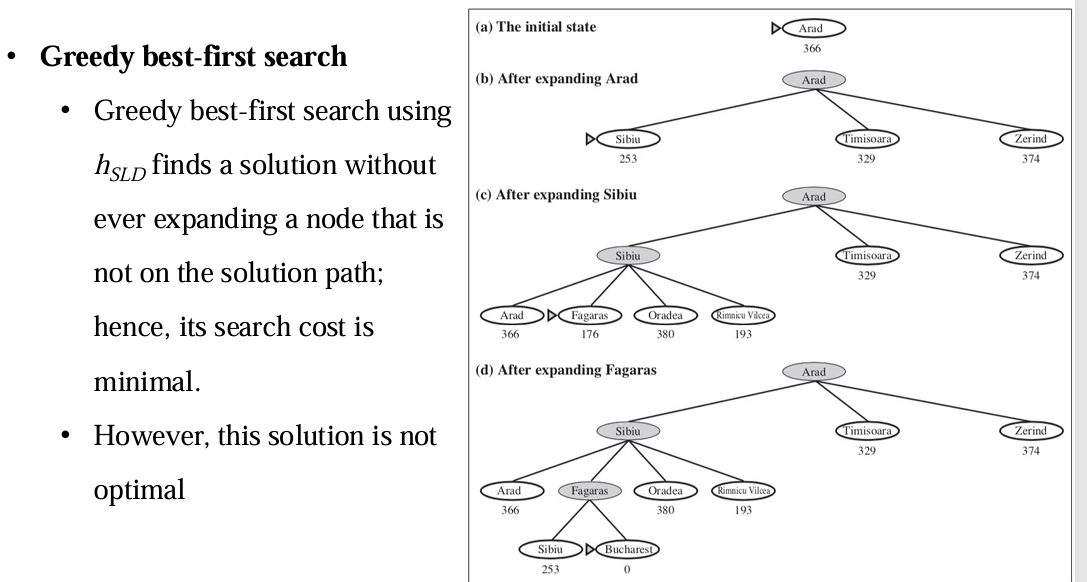
- 未必是最佳解
- 在有限狀態空間是completemess 無限狀態空間則否
- A星算法
- 使用到當前節點的 g(n) path cost
- h(n) 當前節點到目標節點的estimated cost
- 有條件的optimality
- 不高估實現目標的成本
- estimated costs 的三角不等式
Ch3 Solving Problem by Searching
https://z-hwa.github.io/webHome/[object Object]/Introduction to Artificial Intelligence/Ch3-Solving-Problem-by-Searching/